.png)
The PICO debugger Probe is a custom-built tool (for more please check repo) help you fix broken code and test custom electronics boards(PI it self), that not only debugs your code but also protects your computer from electrical spikes, adapts t…
The PICO debugger Probe is a custom-built tool (for more please check repo) help you fix broken code and test custom electronics boards(PI it self), that not only debugs your code but also protects your computer from electrical spikes, adapts to any voltage, and tells you exactly how much power your project is consuming.
I accidentally crashed my Raspberry Pico debugger due to a voltage spike.
standard debuggers only operate at 3.3 volts—if you accidentally plug them into a 5-volt board, you fry your debugger , And that’s exactly what happened to me too
hardwere used :-
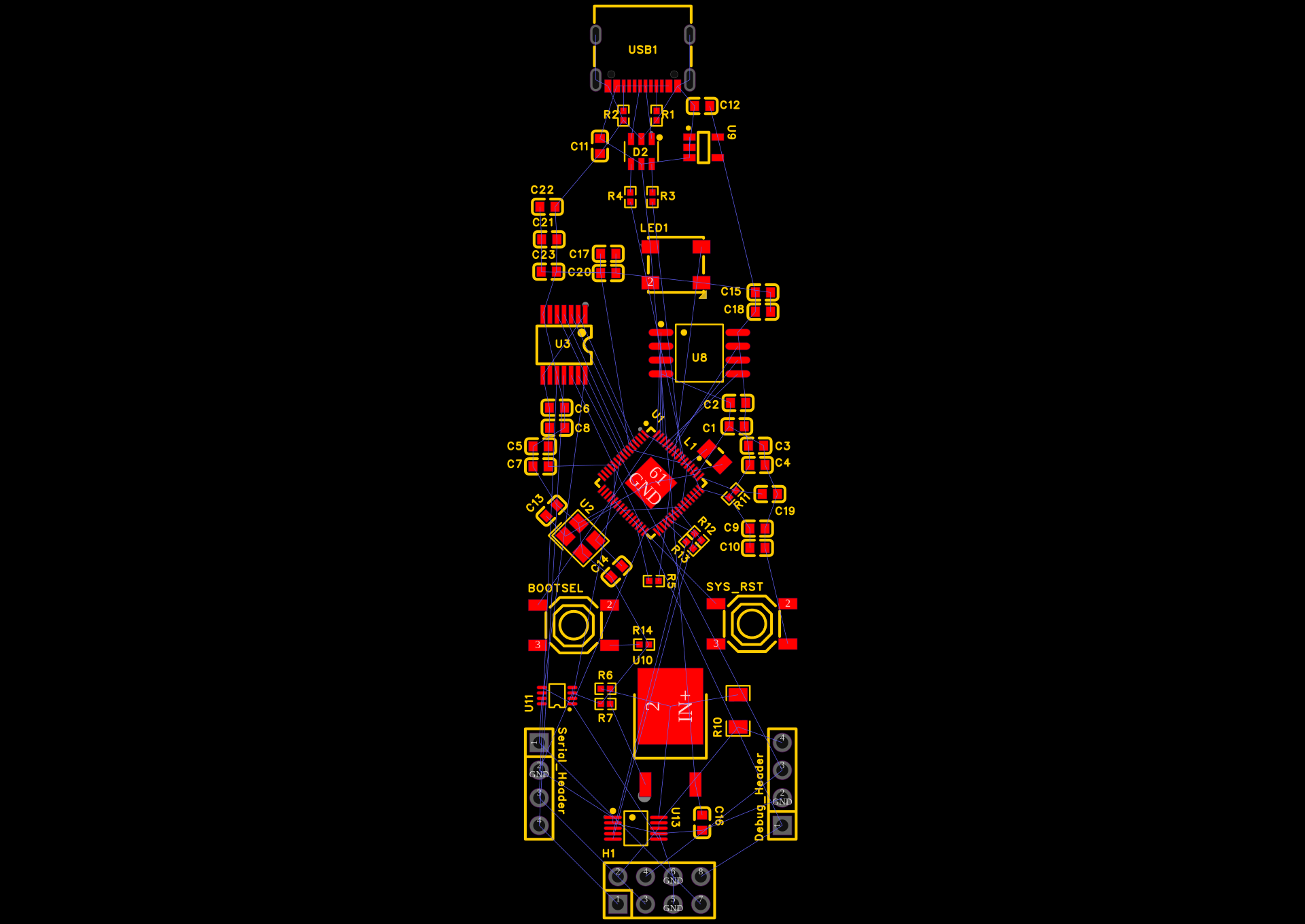
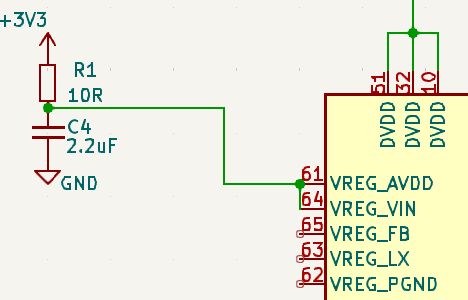
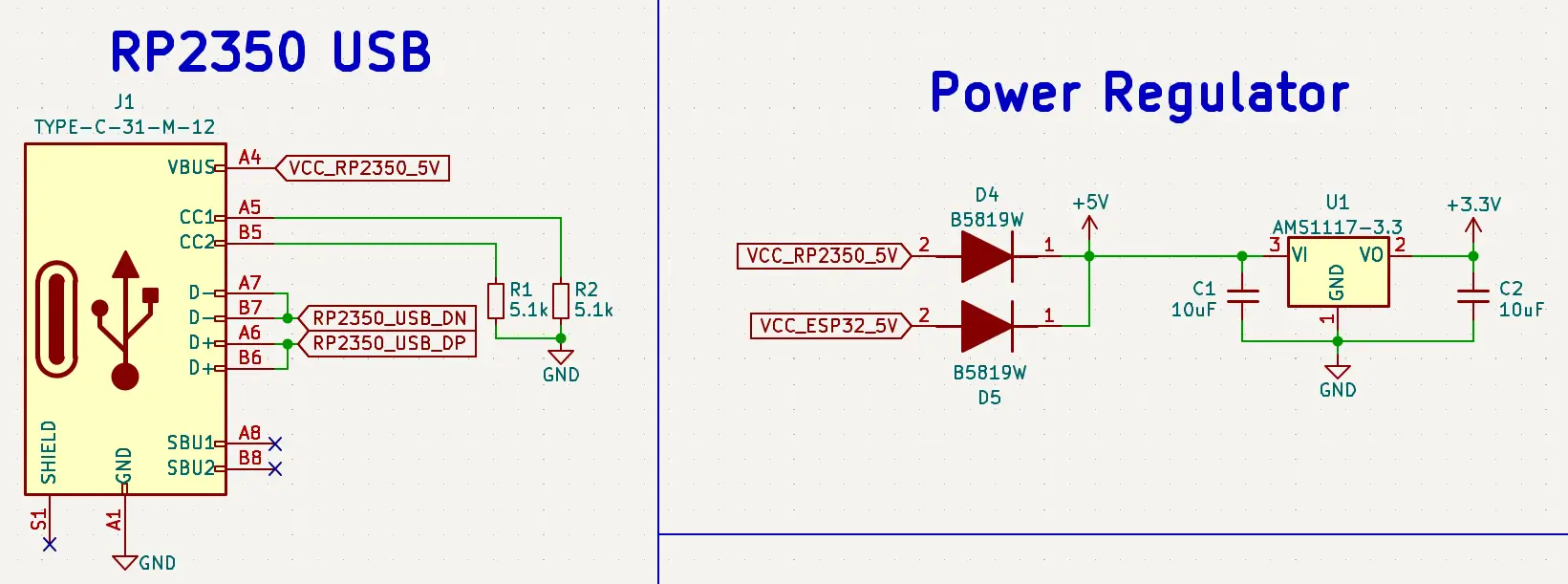
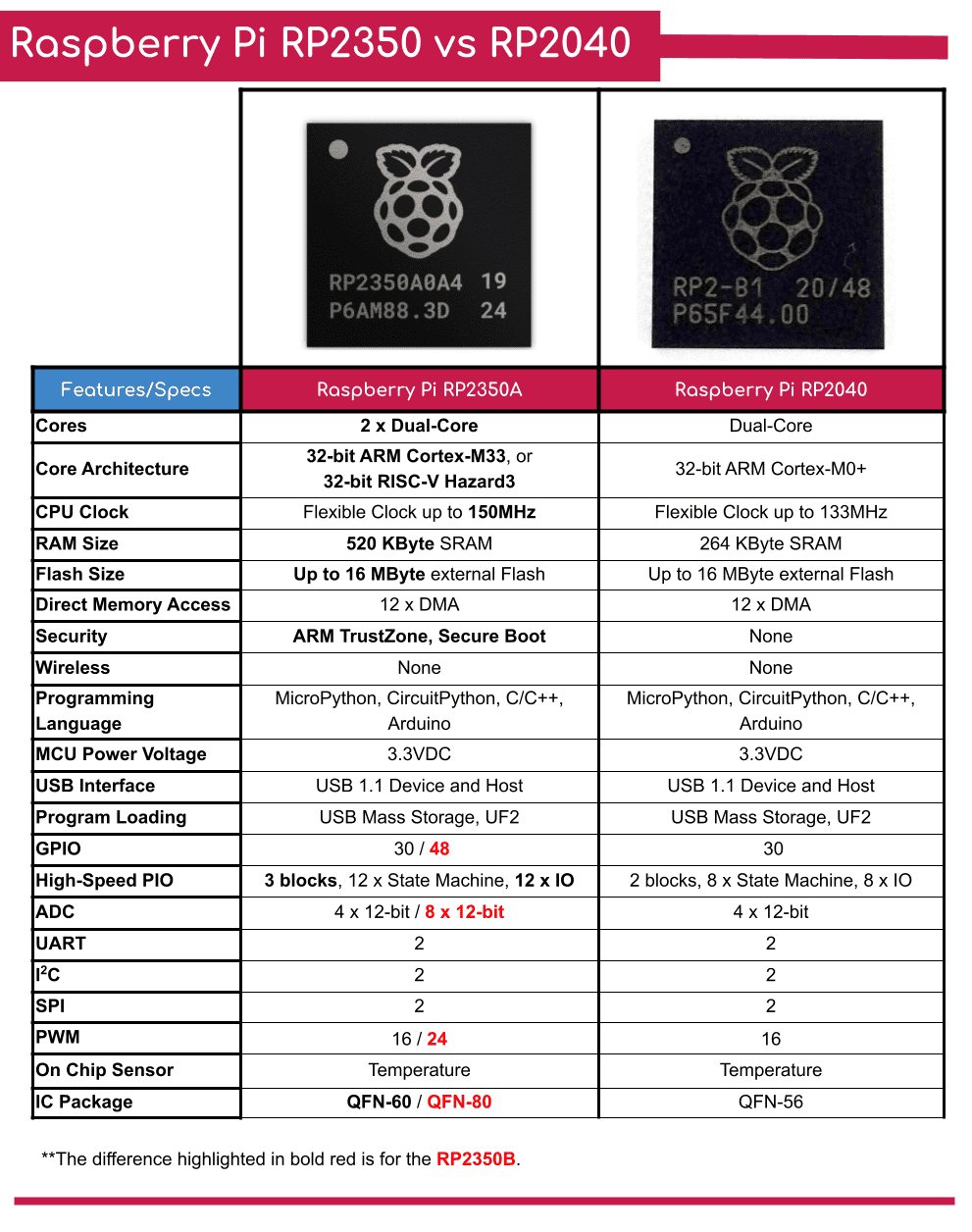
- Microcontroller: Raspberry Pi RP2350A (QFN-60)
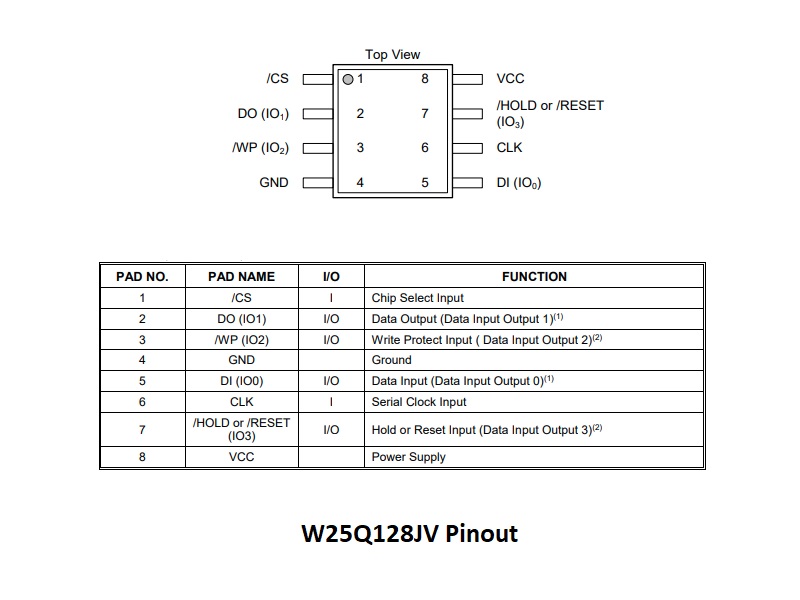
- Memory: 16MB QSPI Flash (Winbond W25Q128JV)
- Core Power: Custom Switched-Mode Power Supply (SMPS) utilizing a 3.3µH inductor.
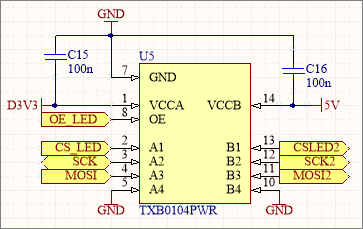
- logic Level Shifting: * TXB0104 (4-Channel Auto-Direction) for SWD and UART.
-
- GT74LVC2T45 (Direction-locked) for Target Hardware Reset.